Autonomous Maze Navigation

Overview
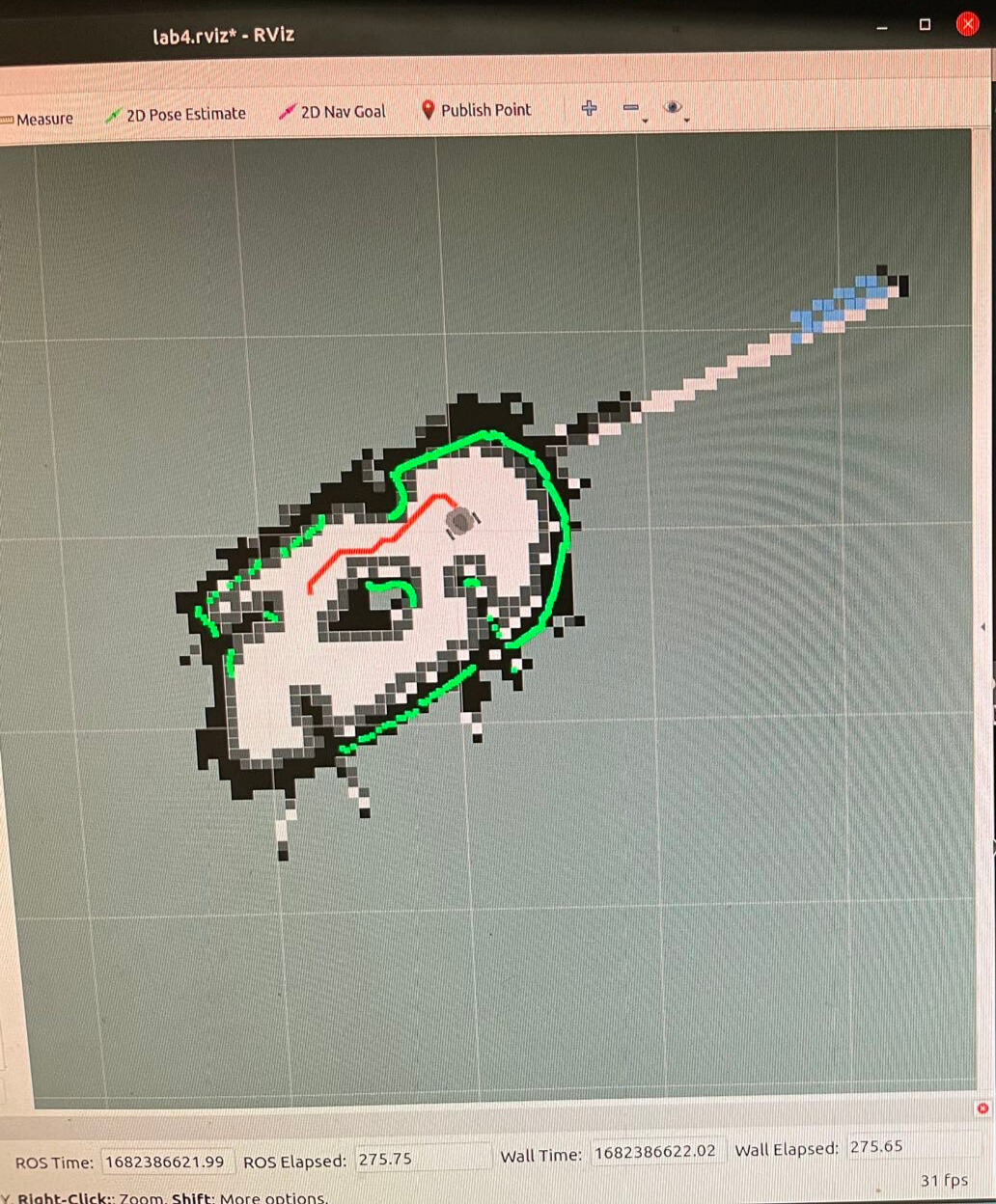
A Turtlebot 3 robot was programmed to explore an unknown maze, generate a map using laser-based SLAM, and then utilize the AMCL algorithm for self-localization within the generated map to navigate to a desired destination using A* search.
It was coded in Python, ran in Linux with ROS.
Key Features
- Feature 1: Autonomous maze navigation with SLAM.
- Feature 2: Map generation.
- Feature 3: Path planning.
- Feature 4: Identify and avoid obstacles.