Electronic-free Fluidic Actuators
Overview
In order to complete the final project, as shown above, we learned the major topics of soft robotics -- design and fabrication of soft systems, elastic actuation, embedded intelligence, soft robotic modeling and control, and fluidic power.
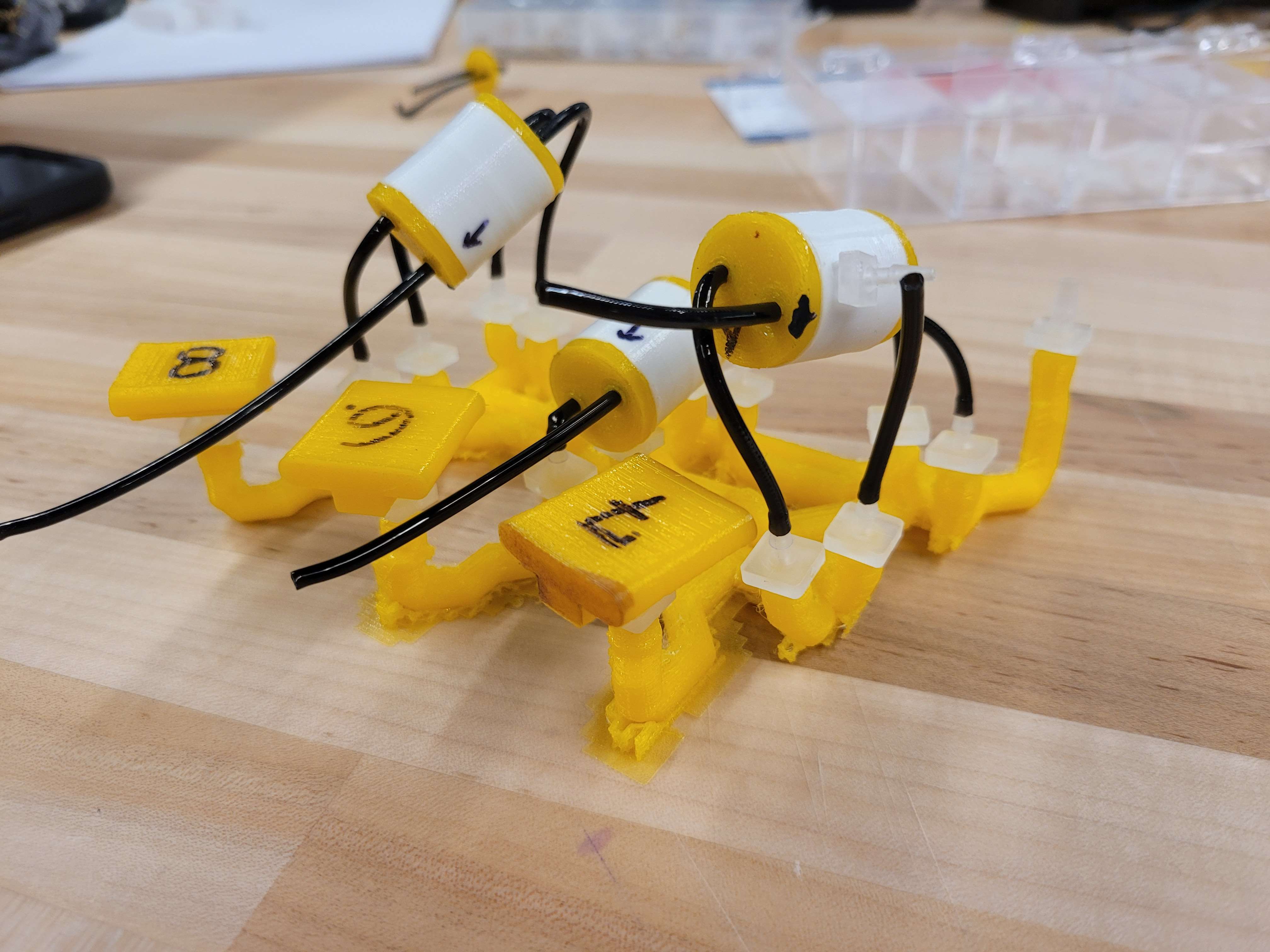
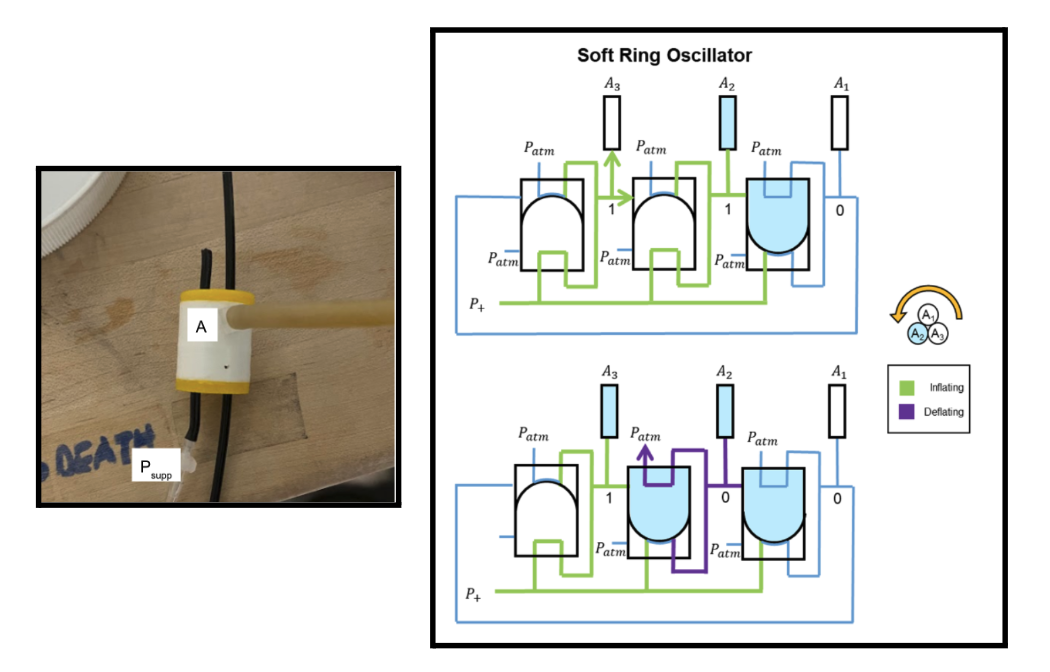
Figure 1 is a replica of a 3-Ring Oscillating Circuit1. with linear actuators as the end actuators, the schematic of the system is shown as Figure 2. The circuit worked with small imperfections mainly due to imperfection printing, the valves and the actuators are not completely air-tight; but the general idea of a 3-Ring Oscillating Circuit was successfully conveyed through this electronic-free setup.
STREAM was used to design the tubing between the valves, actuators, and input pressure.
Key Features
- Feature 1: Electronic-free 3-Ring Oscillating Circuit
- Feature 2: 3D printed
- Feature 3: Pneumatic/Fluidic Power
- Feature 4: Soft Robotics
1. Dylan Drotman et al. (2021). Electronics-free pneumatic circuits for controlling soft-legged robots.. Sci. Robot.6,easy 2627.